
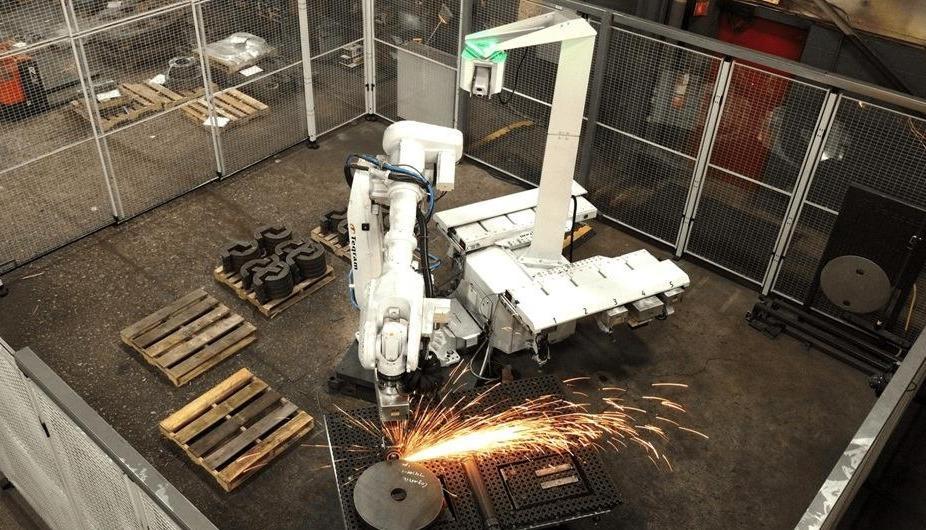

FIGURA 1. Esta celda de rectificado guiada por visión, instalada en All Steel Merchandise en Rockford, Illinois, tiene una cámara montada sobre la celda. Ésta proporciona la vista common, mientras que escáneres integrados en el extremo del robotic captan los detalles.
Si entra a Tosec BV, con sede en Países Bajos, verá los sellos distintivos de muchos fabricantes de steel a la medida. Escuchará el zumbido de las mesas de plasma, cortadoras láser y arcos de soldadura. Sin embargo, si se adentra más en las instalaciones, empezará a darse cuenta de que no se trata simplemente de otro taller más de fabricación.
Un robotic alimenta piezas a una máquina desbarbadora de piezas planas. Un sistema de recolección de piezas usa dos robots para asir y clasificar piezas cortadas en un sistema de torre único. Las piezas extremadamente grandes son retiradas por un sistema de elevación adyacente. Robots de rectificado y desescoriado automatizan un arduo proceso de acabado de bordes de placa. Lo mas notable es que el efector remaining de los robots sujeta una herramienta de rectificado de ángulo recto convencional, y una cámara supervisa todo en la celda.
Aún más notable es el emblem en estas celdas automatizadas: una T estilizada—el mismo emblem de Tosec y su compañía matriz, Tollenaar Industries, una compañía acquainted con operaciones en Países Bajos, Alemania y Sudáfrica. A través de su subsidiaria Teqram, Tollenaar Industries ha desarrollado sistemas de automatización basados en visión, hechos especialmente para fabricantes a la medida y operaciones similares de alta mezcla de productos.
Tosec (junto con Rime GmbH, su fabricante filial en Alemania) sirvió inicialmente como el campo de pruebas para los productos de Teqram. Si el concepto funcionaba en Tosec y en Rime, probablemente atraería a otros fabricantes a la medida que enfrentaban retos similares. Actualmente, Teqram se ha expandido hasta el punto en que ahora está desarrollando nuevos conceptos de automatización directamente con nuevos clientes.
Hay un común denominador en casi todos los proyectos de automatización de la compañía: usted no encontrará programación handbook ni operadores usando controles colgantes de enseñanza. En lugar de esto, la automatización es guiada por tecnología de visión potenciada por inteligencia synthetic.
Empiece con la visión
Frans Tollenaar, director common de Teqram, junto con su hermano Roland, el ingeniero en jefe de la compañía, señaló un robotic guiado por visión—llamado el EasyGrinder—mientras éste terminaba los bordes de una placa cortada con plasma. El efector remaining no tenía cabeza de rectificado especializada, en lugar de esto usaba una rectificadora de ángulo recto convencional, equipada con un disco estándar diseñado para operación handbook.
“Tomamos una decisión muy consciente cuando elegimos usar herramientas manuales, simplemente por la amplia gama de procesos que éstas ofrecen. Podemos usar cinceles, bandas, fresas de carburo, piedras amoladoras. Necesitábamos esa flexibilidad”, dijo Tollenaar. “Y para nosotros, algunas de éstas rectificadoras de ángulo recto pueden durar un año o más. Cuando se usan en una configuración handbook, podrían durar unas cuantas semanas. Y los abrasivos también tiene larga duración. Invitamos a compañías como 3M, y simplemente quedaron sorprendidas del desempeño que obteníamos de los abrasivos, debido a que los usamos de manera optima”.
Hay tres elementos que ayudan a crear esta celda. Primero está la visión, la cual elimina el elemento que con frecuencia hace que la automatización sea impráctica para el taller de alta mezcla en bajo volumen: la programación robótica. ¿Por qué invertir en un robotic cuando los operadores necesitan gastar valioso tiempo en la planta enseñándole? La simulación fuera de línea puede funcionar, pero debido a que la simulación nunca concuerda a la perfección con la realidad, los operadores todavía tienen que ajustar ese programa una vez que el trabajo llega a la planta de producción. Incluso las interfaces de programación más sencillas de cobot requieren al menos cierta intervención del operador. Ese tiempo se acumula, especialmente al procesar miles de piezas diferentes en lotes pequeños.
De regreso a la planta de producción, Tollenaar señaló una cámara arriba de la celda de rectificado—la EasyEye (vea la Figura 1). La unidad incorpora un láser de tiempo de vuelo (el cual mide distancia) y una lente de alto zoom óptico.
“Esa cámara genera las coordenadas XYZ y las correlaciona con los píxeles que observa”, dijo. “Básicamente, nos da las coordenadas de píxeles en el espacio, y con esto podemos usar algoritmos de visión para determinar exactamente lo que el robotic debe hacer”. Los escáneres integrados cerca del extremo del robotic proporcionan la vista detallada. “Eso da detalles como agujeros, protuberancias y otra información que necesitamos para procesar esa pieza con exactitud”.

FIGURA 2. Una herramienta de rectificado handbook se monta en un efector remaining de robotic con un mecanismo de bisagra que actúa como un contrapeso, diseñado para optimizar la presión para herramientas específicas.
Una vez que el robotic conoce la pieza exacta que tiene, debe extraer las características que necesita para procesar la pieza. Es aquí donde entra en juego la lógica específica de la aplicación. Si el robotic “detecta” un cierto conjunto de características de la pieza, sabe que debe elegir una herramienta determinada, ya sea un disco de rectificado (vea la Figura 2), un cincel para remover escoria, u otra herramienta handbook—para atender esas características. El robotic se desplaza a un rack adyacente para cambiar herramientas. Primero cambia un agarre magnético con un efector remaining que sujeta una herramienta de cincel handbook (vea la Figura 3)—el mismo cincel handbook que usaría un humano. Una vez que quita la escoria, cambia el cincel por un efector remaining que sujeta una rectificadora de ángulo recto, la cual utiliza para alisar y aplicar un radio al borde superior.
Como explicó Tollenaar, ciertas aplicaciones sí requieren un archivo CAD, como piezas que requieren el acabado solamente de un borde, o quizás un lado que deba rectificarse a un bisel de 45 grados. Sin embargo, en configuraciones típicas, alrededor de 80% de las piezas no requiere un archivo CAD. “Escaneamos la tarima, levantamos la pieza, la dejamos en el EasyFlipper, escaneamos la pieza a detalle, y rectificamos”.
Ya sea que el robotic utilice sólo visión o una combinación de visión y el archivo CAD, la única intervención del operador es elegir una “receta” predeterminada, la cual depende de la calidad requerida. Para una pieza cortada con oxicombustible, por ejemplo, el robotic “vería” la escoria en los bordes de la pieza y sabría cómo ejecutar los siguientes pasos: cincelar, rectificar a un radio de borde, eliminar marcas de entrada y salida, luego voltear la pieza y repetir.
“Nuestra meta es que la tecnología trabaje como lo haría un humano”, dijo Tollenaar. “Usted le da a alguien un lote de piezas y le cube, ‘por favor rectifíquelas y hágale un radio en los bordes’. Lo que queremos es dar un conjunto sencillo de instrucciones, y que a partir de ahí, el robotic haga su trabajo”.
Esos lotes de piezas se encuentran en tarimas almacenadas en lugares específicos dentro de la celda de rectificado. Cambiar las posiciones de las tarimas sí requiere cierto trabajo de programación para establecer puntos de referencia. Sin embargo, cuando se establecen las posiciones de las tarimas, el sistema de visión sabe dónde ver para completar el trabajo. Éste “ve” la tarima con piezas y sabe que tienen que levantarse y colocarse en la mesa de trabajo, procesarse con diferentes herramientas (todas ellas colocadas en un rack adyacente para cambios automáticos de efector remaining), y luego colocarse en una tarima de descarga.
Acerca del posicionamiento
Tollenaar señaló después el EasyFlipper, la mesa de trabajo de la celda que opera como una mesa tipo almeja. Cuando el robotic está operando, la almeja se abre, y potentes imanes aseguran la placa. Una vez que el robotic termina con un lado, la almeja se cierra y voltea la pieza de trabajo, mientras los imanes en un lado se desactivan para transferir la placa a los imanes en la otra almeja (vea la Figura 4).
Esta tecnología cubre el segundo elemento que hace posible este tipo de automatización de alta mezcla de productos: sujeción sencilla y versatile que no requiere intervención del operador. La celda no tiene mecanismos hidráulicos de sujeción ni siquiera pinzas de palanca sencillas, sólo unos potentes imanes.
Tollenaar reconoció que esto sí limita la tecnología al acero al carbón y a otros materiales ferríticos (aunque la celda puede procesar acero inoxidable austenítico y placas no ferrosas lo suficientemente pesadas para estar aseguradas sin sujeción). Nuevamente, se trata de un ambiente de alta mezcla de productos donde cada pieza puede ser diferente. Si los operadores tuvieran que entrar a la celda a reacomodar hasta las pinzas de palanca sencillas después de cada ciclo de rectificado, se vería reducido el valor de la automatización.
Acerca de la presión
Las herramientas manuales están diseñadas teniendo en mente al humano. Es decir, están hechas para ser manipuladas a un ángulo y presión específicos con relación a la pieza de trabajo. No se construyen para robots. Entonces, cómo puede adaptarse el robotic—¿sin programación?
Para explicarlo, Tollenaar señaló un componente abisagrado que sobresalía de un efector remaining. Es un contrapeso (vea la Figura 2). “Nosotros lo patentamos. Usamos ese contrapeso para aplicar la presión correcta y usamos un codificador para leer el ángulo”. El software program de Teqram utiliza los datos del sistema de visión, la lógica de proceso para cada herramienta específica, el contrapeso y las lecturas del codificador para aplicar la presión correcta, el ritmo de alimentación y las RPM adecuadas para procesar la pieza de manera consistente.

FIGURA 3. Un robotic elimina escoria de una placa gruesa usando un cincel, la misma herramienta handbook que usaría un humano en una operación handbook.
“Considere cómo el robotic utiliza la herramienta con un disco de rectificado en la posición horizontal. El disco puede estar entre 0 y 30 grados. Hemos optimizado el contrapeso para tener la presión correcta para las herramientas dentro de esos diferentes ángulos de aproximación”.
Un mecanismo de resorte independiente ayuda a establecer la presión correcta para las herramientas en posición vertical, por ejemplo, una rectificadora de ángulo recto aplicando un radio al borde superior de una placa (vea la Figura 5).
Corte, biselado, desbarbado
Actualmente, Teqram tiene unas instalaciones expansivas de investigación y desarrollo a más o menos una cuadra de Tosec, en un área industrial afuera de Zwolle, en el noreste de la provincia de Overijssel, Países Bajos. Esas instalaciones actualmente cuentan con hileras de robots y varias áreas para probar conceptos de automatización versatile para diversas aplicaciones industriales.
El lugar mantiene sus raíces en la fabricación de steel a la medida. Si usted camina esa cuadra hacia Tosec podrá ver en acción muchos de esos conceptos. En el corte láser, un clasificador de piezas de gran capacidad organiza piezas cortadas con láser (vea la Figura 6). Aquí de nuevo, la visión tiene un papel. El nido cortado con láser es lanzado a la mesa de descarga, donde el EasyEye “ve” la hoja para establecer su posición actual. El robotic se remite al archivo de arreglo de nido DXF y clasifica piezas en tarimas individuales, las cuales luego se almacenan en la torre adyacente. Los robots levantan piezas con pesos de 1,300 libras (590 kilogramos), hasta cierta dimensión. Las piezas extremandamente grandes son levantadas y apiladas por un sistema de elevación adyacente.
“Éstos pueden instalarse en máquinas de corte existentes”, dijo Tollenaar. “Y la interfaz del operador es intuitiva. Ésta le pregunta a los operadores cómo quieren agrupar piezas, como por ejemplo por proyecto o lo que se necesite en una operación corriente abajo”.
LOS TOLLENAAR EN LA FABRICACIÓN DE METAL: UNA BREVE HISTORIA
Frans Tollenaar es parte de la segunda generación de un negocio acquainted que ha avanzado mucho desde que su padre se fue de los Países Bajos a Sudáfrica. “Lo hizo por la aventura que todo eso implicaba”, dijo, “y en Pretoria fundó una pequeña planta de manufactura de tubo, Tubecon, la cual actualmente es fabricante líder de tubo en Sudáfrica. Ahí es donde empezó todo”.
A finales de la década de 1980, el padre de Tollenaar regresó a vivir a Países Bajos. La familia adquirió Tosec en la década de 1990 y, en los siguientes años, también adquirió Rime GmbH, un fabricante de piezas de trabajo grandes en Riesa, Alemania, entre Dresden y Leipzig. En 2012 lanzaron TME, una empresa de ingeniería mecánica especializada en sistemas y equipos para operaciones offshore y manejo de materiales a granel, la cual más adelante compró Martec, especialista en materiales resistentes al desgaste.
En 2016, los Tollenaar lanzaron Teqram para desarrollar y vender sistemas de automatización usando tecnología de visión potenciada por IA. Actualmente, la compañía está asociada con Automated Fabrication Methods para vender y dar soporte a instalaciones en Norteamérica.
El sistema no puede manejar todos los perfiles cortados. Los robots de brazo articulado pueden maniobrar para levantar algunos perfiles difíciles, y hacen varios intentos antes de decidir registrar que una pieza está atorada y que debe ser retirada manualmente; luego se mueve a la siguiente pieza.
“El sistema depende en alto grado de resultados de corte de alta calidad”, dijo Tollenaar. “Necesita rendijas lo suficientemente anchas y piezas con suficiente separación para desanidarse de manera consistente”. Sin embargo, el sistema está diseñado para manejar una gama de tamaños de pieza. Los robots pueden levantar mini-nidos de piezas de trabajo diminutas, mientras que las grúas levantan piezas cortadas que ocupan gran parte de la mesa de corte.

FIGURA 4. Una mesa de fijación magnética tiene un diseño tipo almeja. Cuando el robotic concluye el rectificado del borde superior, la almeja se cierra para voltear la pieza. Un rack adyacente (cerca de la parte superior de la imagen) contiene varios efectores finales: un levantador magnético de piezas, una herramienta handbook de cincel, y un disco de rectificado, entre otros.
Si camina corriente abajo verá robots alimentando el desbarbado de piezas planas (vea la Figura 7). Teqram tiene tecnología comparable disponible para alimentar sistemas de biselado de piezas. Para biselado de piezas en explicit, la tecnología de visión funciona en múltiples frentes. Reconoce la pieza que el robotic está levantando y sabe cuándo una pieza se está regresando a la máquina para otra pasada. Además, puede medir la planitud remaining de la pieza y clasificar cada pieza en consecuencia—ya sea en una tarima de “pieza buena” o en otra tarima con rechazos.
Al alimentar una máquina desbarbadora, los robots colocar varias piezas cercanas entre sí sobre la banda transportadora. La visión también monitorea la estación de descarga después del desbarbado. Cuando hay una acumulación, la automatización se ralentiza o detiene la operación hasta que el cuello de botella desaparece, “tal como lo haría un operador humano”, dijo Tollenaar.
Automatice las obstrucciones
La maquinaria moderna de fabricación de steel se ha vuelto sumamente productiva. Sin embargo, cuanto más productiva sea una máquina, más fácil es agravar un cuello de botella corriente abajo—y la mayoría de las veces, esa operación con cuello de botella es handbook.
Hasta los fabricantes más automatizados actualmente tienen islas de operación handbook. Los láseres cortan con las luces apagadas, pero los trabajadores llegan al día siguiente a clasificar cientos de piezas cortadas, para luego alimentar manualmente al menos algunas de esas piezas a la máquina de desbarbado, quizás hasta a una niveladora de piezas. Como lo demostró la automatización empleada por Tosec y desarrollada por Teqram, las tecnologías de visión y de IA muestran un gran potencial, incluso para los talleres con trabajos de la más alta mezcla de productos que existan por ahí. Conforme avanza la innovación, esas islas de operación handbook podrían desaparecer gradualmente.




{kind=link}